微机电系统(MEMS)测试特别是动态特性表征对其设计、制造和可靠性运行具有非常重要的意义。MEMS结构本身的极微小尺寸(微米级到纳米级)和超高频振动响应(数千赫兹到数兆赫兹),决定了MEMS动态特性表征的困难性和复杂性。为此,我们研究基于光学的非接触式无损测量方法及测量系统,以实现MEMS高频高速运动的三维可视化测量及其动力学特性的可编程自动测试与分析。
该动态测量系统集成了移相干涉、计算机视觉、频闪照明等关键技术,而且包含基础激励和环境控制子系统,从而可以实现在不同压力、不同温度下的MEMS动态激励及响应测量。提出了一种新的旋滤波算法,在有效滤除干涉图像噪声的同时,保护锯齿相位图的2π跳变边界不受影响。提出了一种亚像素综合定位匹配算法,实现面内运动测量从像素、粗略亚像素向高精度亚像素级位置的快速定位。
利用该动态测量系统对硅微陀螺仪、微镜、压力传感器、微谐振器阵列及原子力显微镜微悬臂梁等典型MEMS器件进行了静动态测试,取得了满意的测量效果。大量实验研究结果验证了该动态测试系统的有效性和实用性,可实现微结构表面形貌与变形测量及离面运动与面内运动测量,具有全三维、非接触式、高速、可视化和纳米级测量精度的特点。该测量系统的最新改进中增加了垂向扫描白光干涉模块,极大扩展了表面形貌和离面运动的测量范围。
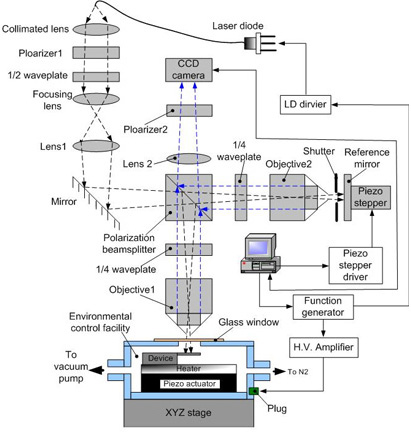
图1 MEMS动态特性测量系统原理结构图
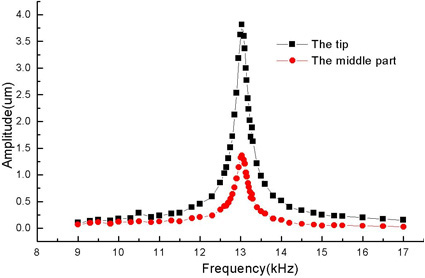
图2 原子力显微镜微悬臂梁振动响应幅频特性测量曲线(表明其共振频率为13.03kHz)
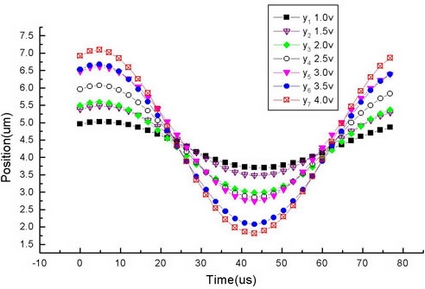
图3 原子力显微镜微悬臂梁在不同激励电压下的离面运动比较(激励周期为80μs)
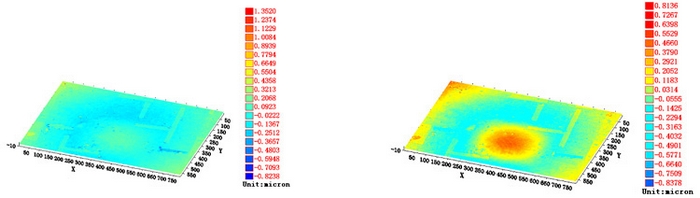
图4 微压力传感器在不同压力下的膜变形测量形貌(压力分别为0.1Mpa和0.5Mpa)
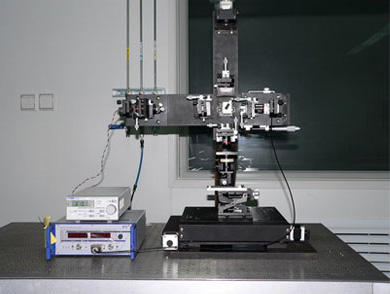
图5 集成了垂向扫描白光干涉模块的改进型测量系统
